Intelligent robotic sonographer for autonomous scanning
Abstract
Ultrasound (US) imaging is widely employed for the diagnosis and staging of peripheral vascular diseases (PVD), mainly due to its high availability and the fact it does not emit radiation. However, high inter-operator variability and a lack of repeatability of US image acquisition hinder the implementation of extensive screening programs.
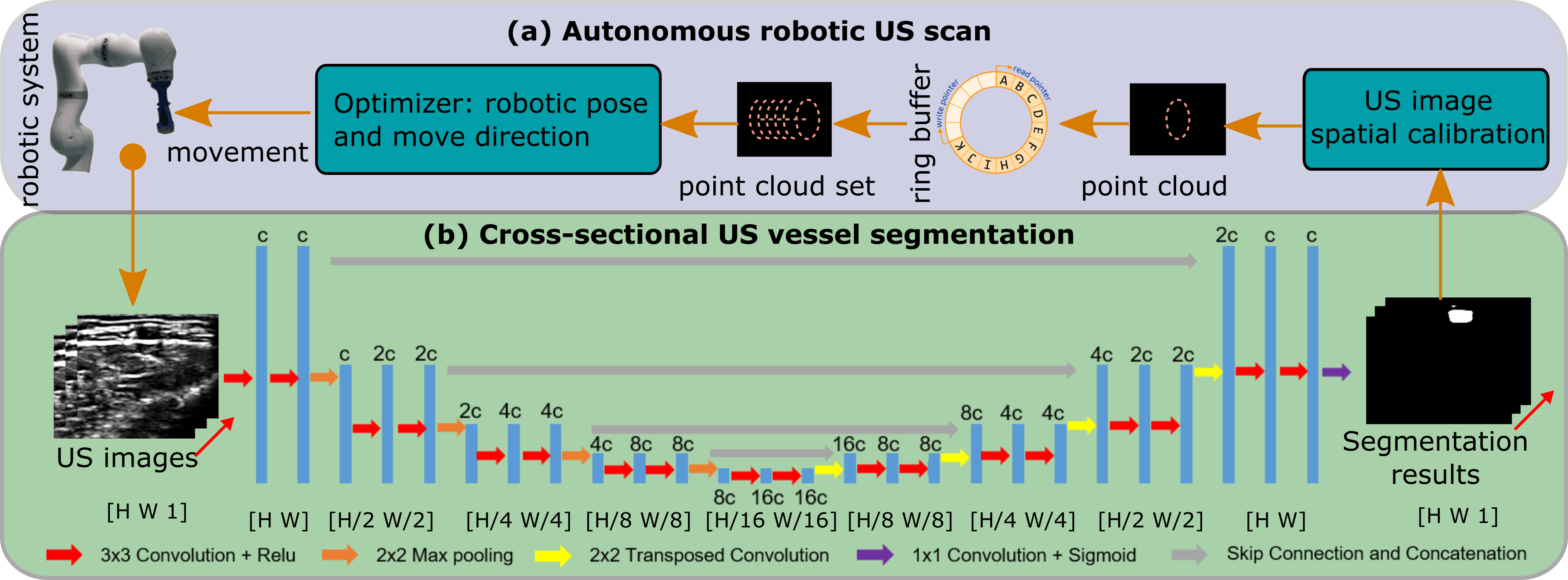
To address this challenge, the robot is employed to facilitate obtaining accurate and repeatable US scans. Benefited from the compliant controller, the contact force between the probe and scanned tissue can be accurately maintained during the scan. To better visualize the target blood vessel, the probe orientation aligned normally with the scanned blood vessel itself. Thus, the US acquisition (force, orientation, and contact point) has been accurately represented.
The goal of the thesis is to develop an intelligent robotic ultrasound system using shared control and MPC to quickly and accurately tune the US probe pose (position and orientation) for repeatable and accurate US images using the real-time US imaging feedback and a generic atlas.
Keywords: Autonomous ultrasound screening, PAD diagnosis, surface point cloud registration, deep learning
Research Partners
Klinikum rechts der Isar (MRI) Clinic for Vascular and Endovascular Surgery Technical University of Munich (TUM)
- Dr.rer.nat. Angelos Karlas
Klinik für Gefäßchirurgie – Helios Klinikum München West
- Dr. med. Reza Ghotbi
Group Members
- Prof. Nassir Navab
- Zhongliang Jiang
- Yuan Bi