Interactive Deformations with Multigrid Skeletal Constraints
Joachim Georgii, Daniel Lagler, Christian Dick, Rüdiger Westermann
Computer Graphics and Visualization Group, Technische Universität München, Germany
Background
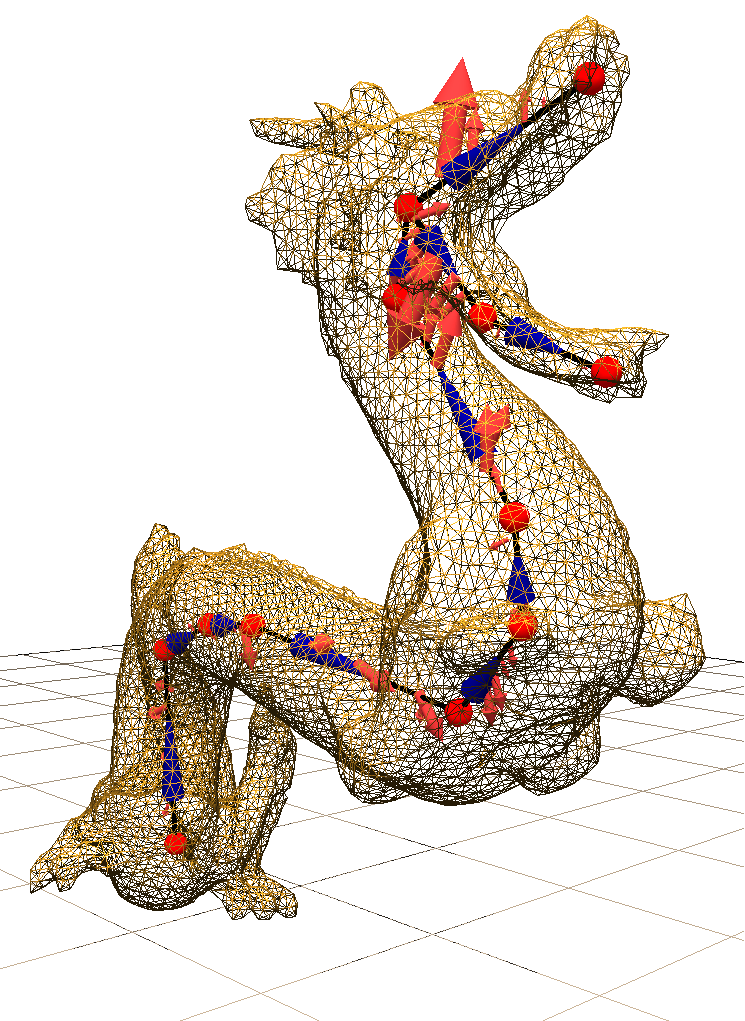
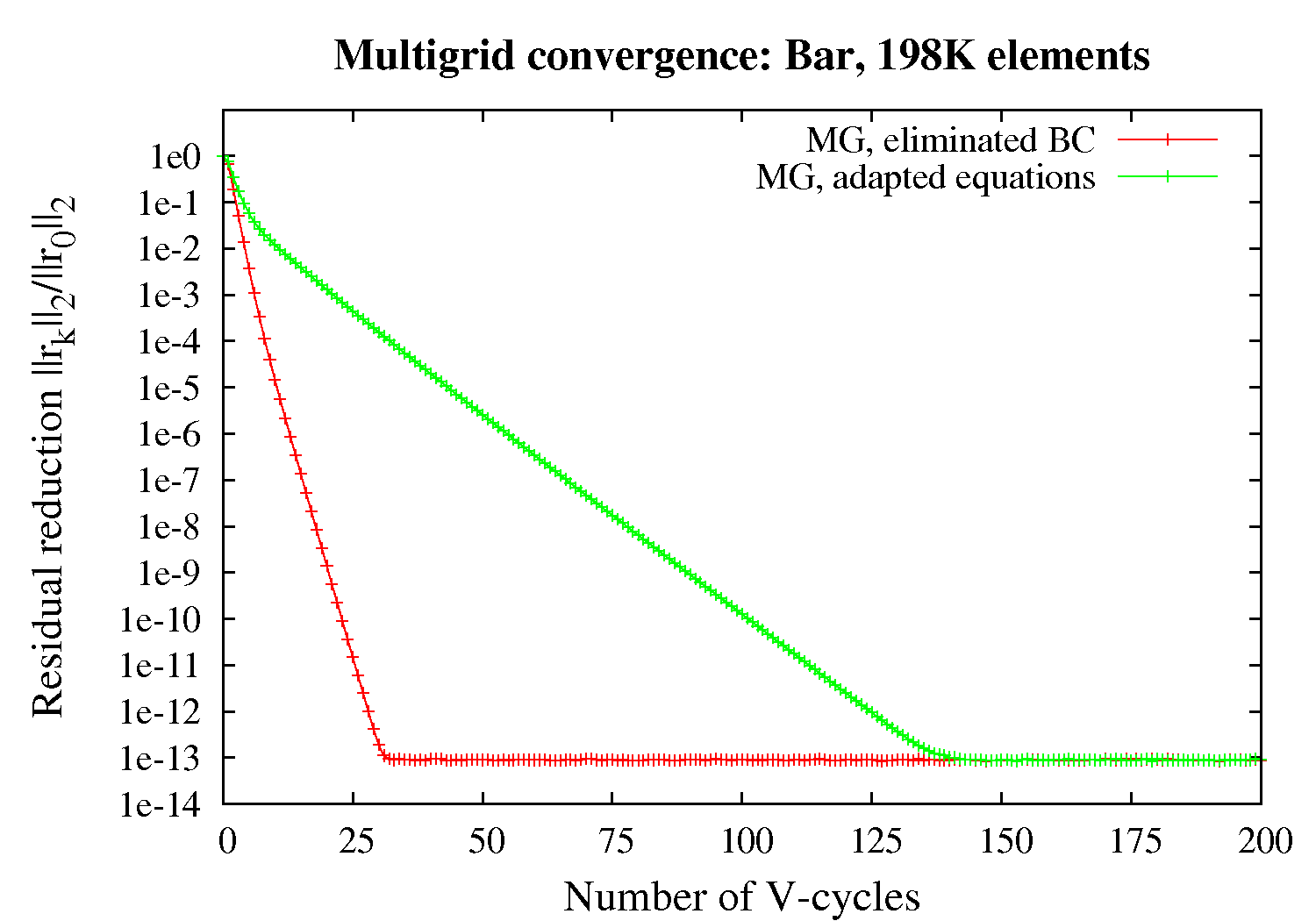
In this paper we present an interactive method for simulating deformable objects using skeletal constraints. We introduce a two-way coupling of a finite element model and a skeleton that is attached to this model. The skeleton pose is determined via inverse kinematics. The target positions of joints are either given by user interactions or forces imposed by the surrounding deformable body. The movement of the deformable body either follows the movement of the skeleton thereby respecting physical constraints imposed by the underlying deformation model, or the movement is determined from user-defined external forces. Due to the proposed two-way coupling, the skeleton and the deformable body constrain each other's movement, thus allowing for an intuitive and realistic animation of soft bodies. To realize the two-way coupling we propose the efficient embedding of the constraints into a geometric multigrid scheme to solve the governing equations of deformable body motion. We present a greedy approach that propagates the constraints to coarser hierarchy levels, and we show that this approach can significantly improve the convergence rate of the multigrid solver.