Corotated Finite Elements Made Fast and Stable
Joachim Georgii, Rüdiger Westermann
Computer Graphics and Visualization Group, Technische Universität München, Germany
Background
Multigrid finite-element solvers using the corotational formulation of finite elements provide an attractive means for the simulation of deformable bodies exhibiting linear elastic response. The separation of rigid body motions from the total element motions using purely geometric methods or polar decomposition of the deformation gradient, however, can introduce instabilities for large element rotations and deformations. Furthermore, the integration of the corotational formulation into dynamic multigrid elasticity simulations requires to continually rebuild consistent system matrices at different resolution levels. The computational load imposed by these updates prohibits the use of large numbers of finite elements at rates comparable to the small-strain finite element formulation.
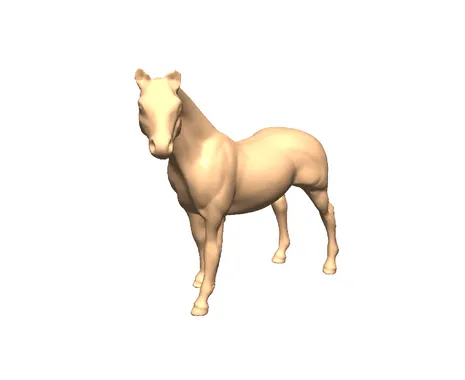
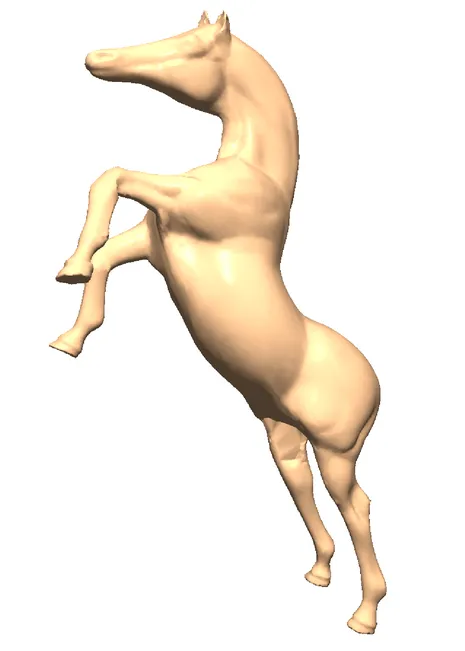
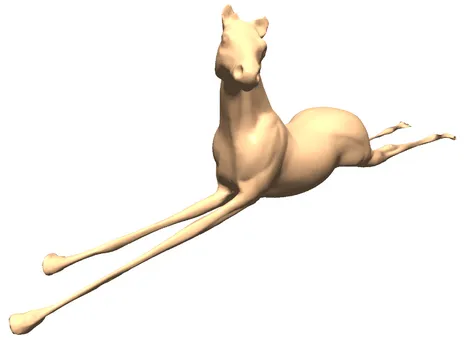
Various large-strain deformations of a tetrahedral horse model are shown.
To overcome the first problem, we present a new method to extract the rigid body motion from total finite element displacements based on energy minimization. This results in a very stable corotational formulation that only slightly increases the computational overhead. We address the second problem by introducing a novel algorithm for computing sparse products of the form R K R^T , as they have to be evaluated to update the multigrid hierarchy. By reformulating the problem into the simultaneous processing of a sequential data and control stream, cache miss penalties are significantly reduced. Even though the algorithm increases memory requirements, it accelerates the multigrid FE simulation by a factor of up to 4 compared to previous multigrid approaches. Due to the proposed improvements, finite element deformable body simulations using the corotational formulation can be performed at rates of 17 tps for up to 12k elements.