Camera Localization and 3D Reconstruction
Contact Persons
Mahdi Hamad (mahdi.hamad(at)tum.de)
Project Coordinator: Benjamin Busam (b.busam(at)tum.de)
Abstract
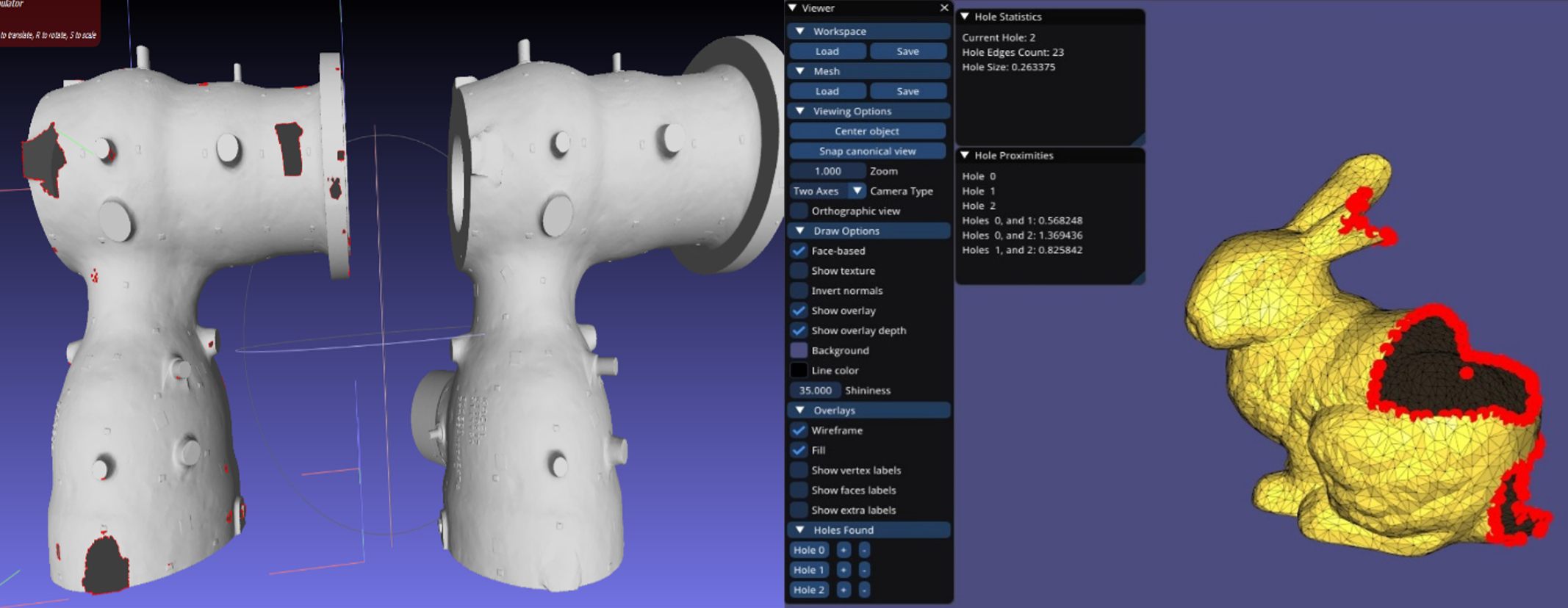
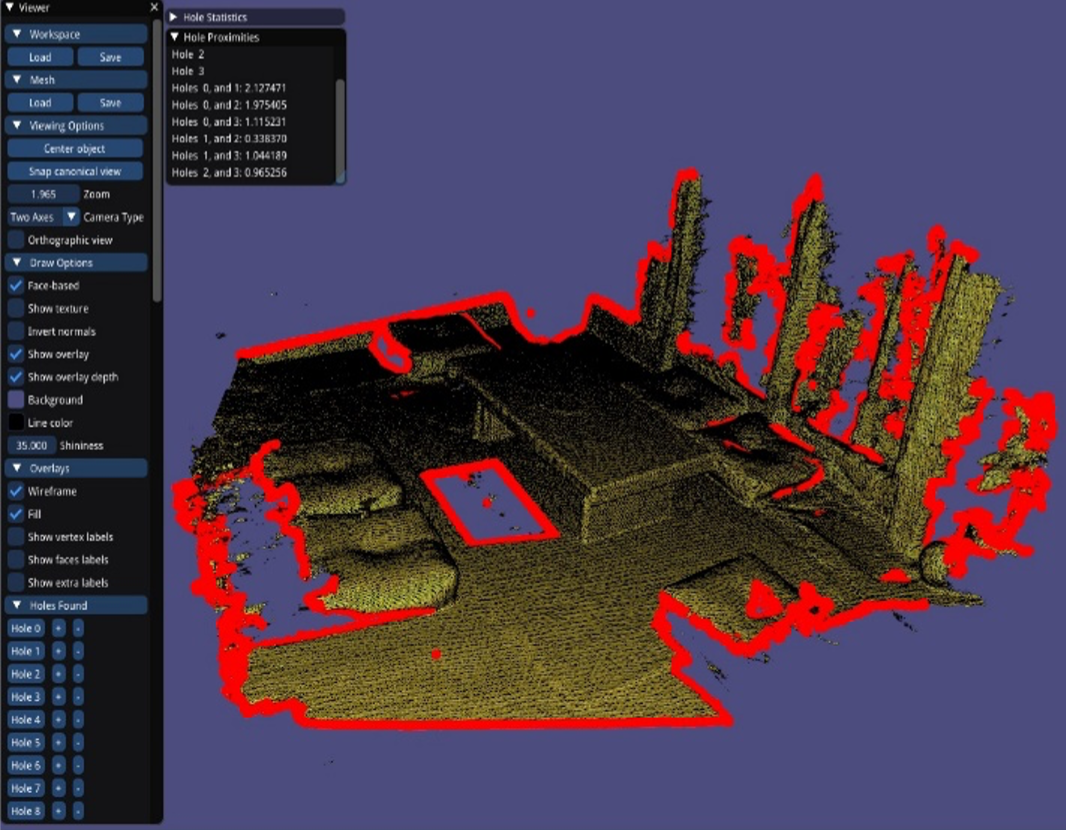
During a 3D scanning process, it is not always possible to acquire every part of the scanned surface. Data is inevitably missing due to the complexity of the scanned part or imperfections in the scanning process. This creates holes in the mesh, problematic triangles, and ultimately results in issues in downstream tasks. The goal of the project is to use available libraries to a) compute a quality measure and characteristic for a given 3D mesh, b) identify problems/issues and c) fix them using hole filling and completion techniques.
Keywords: 3D Computer Vision, 3D Reconstruction, Mesh Analysis, Hole Filling, Mesh Completion
Research Partner
Siemens AG, Munich