Adaptive Walking through Multi-Contact Stabilization (DFG #407378162)
Contact Persons
Federico Tombari, Shun-Cheng Wu (shuncheng.wu@tum.de)
Abstract
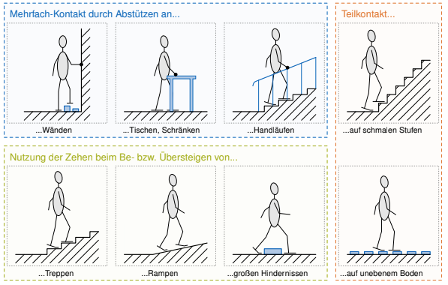
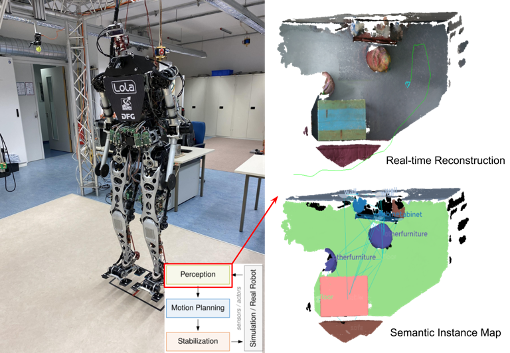
The main goal of this project is to enable adaptive walking behavior to walk through difficult terrain and environments by providing additional hand support for stabilization. This includes the use of multiple contacts during walking as well as the extension of the kinematic capabilities by skillful control of the degrees of freedom or the use of partial contacts. Our chair is in charge of the design of a robust scene understanding method to find stable objects, which can provide stable support, and understand the surrounding terrain. This project is a collaboration with the Chair of Applied Mechanics.